Depuis le début de la mission, j’ai mesuré de façon répété des biais de géolocalisation dans l’ordre de 6 à 7 km sur l’axe de tangage.Afin d’enquêter sur l’origine de ce biais, j’ai voulu utiliser les données des manoeuvres externes, utilisant l’horizon comme principal contraste de la scène, et grâce aux mesures d’attitude à 8Hz issues du senseur stellaire.Malheureusement, en raison de A2 CMN être déverrouillés au moment de l’ECM le 15/12, les données sont inutilisables.Néanmoins, j’ai regardé en détail les données d’attitude.Les figures ci-dessous présentent 2 zooms de ces mesures de Q0 (la partie scalaire du quaternion), provenant de diverses sources: “STR” est directement à partir du senseur stellaire, téléchargé via S-band , “L0 TLM” provient de la télémesure de niveau L0 qui est recopié du bulletin transmis par Protéus à la charge utile, et “L1b” représentent les données d’attitudes interpolées aux temps d’acquisitions des snapshots, inclus dans le fichier L1b.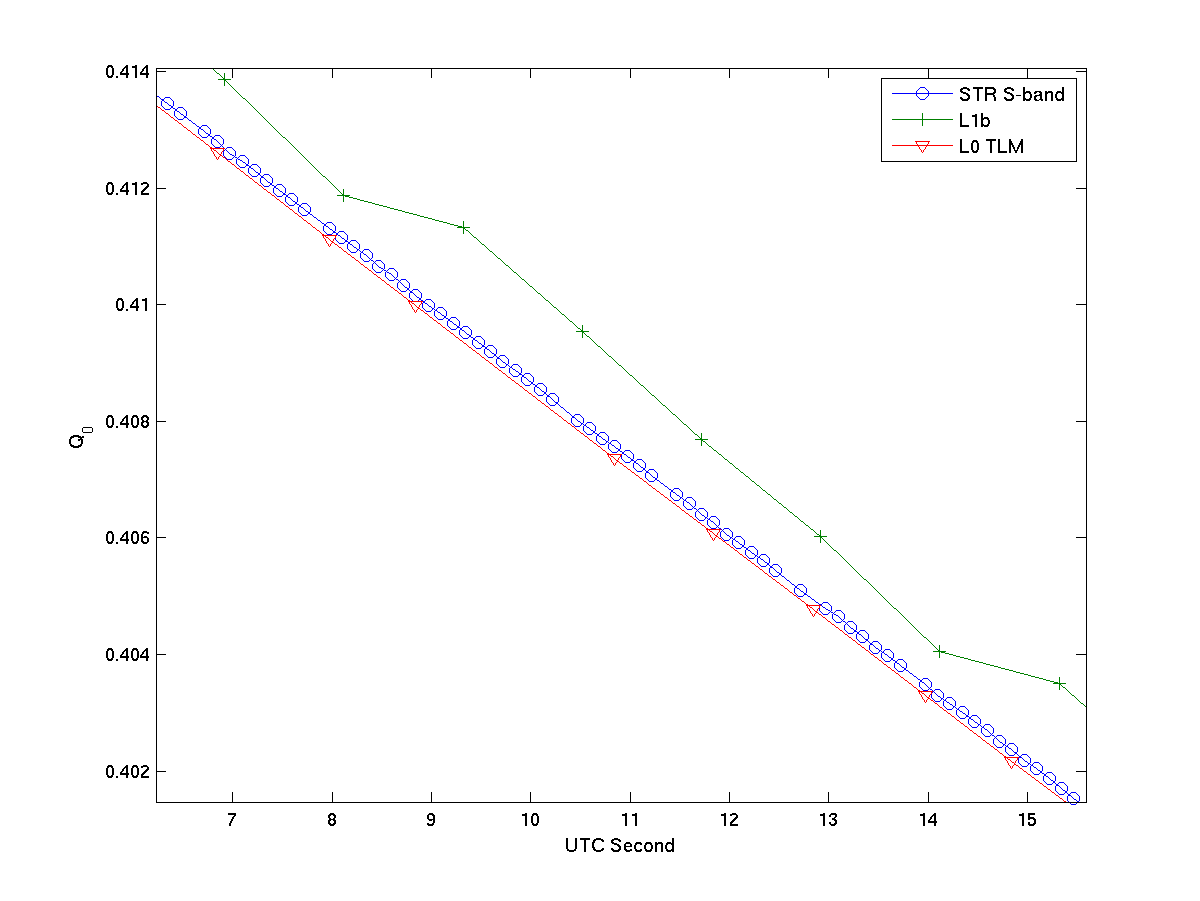
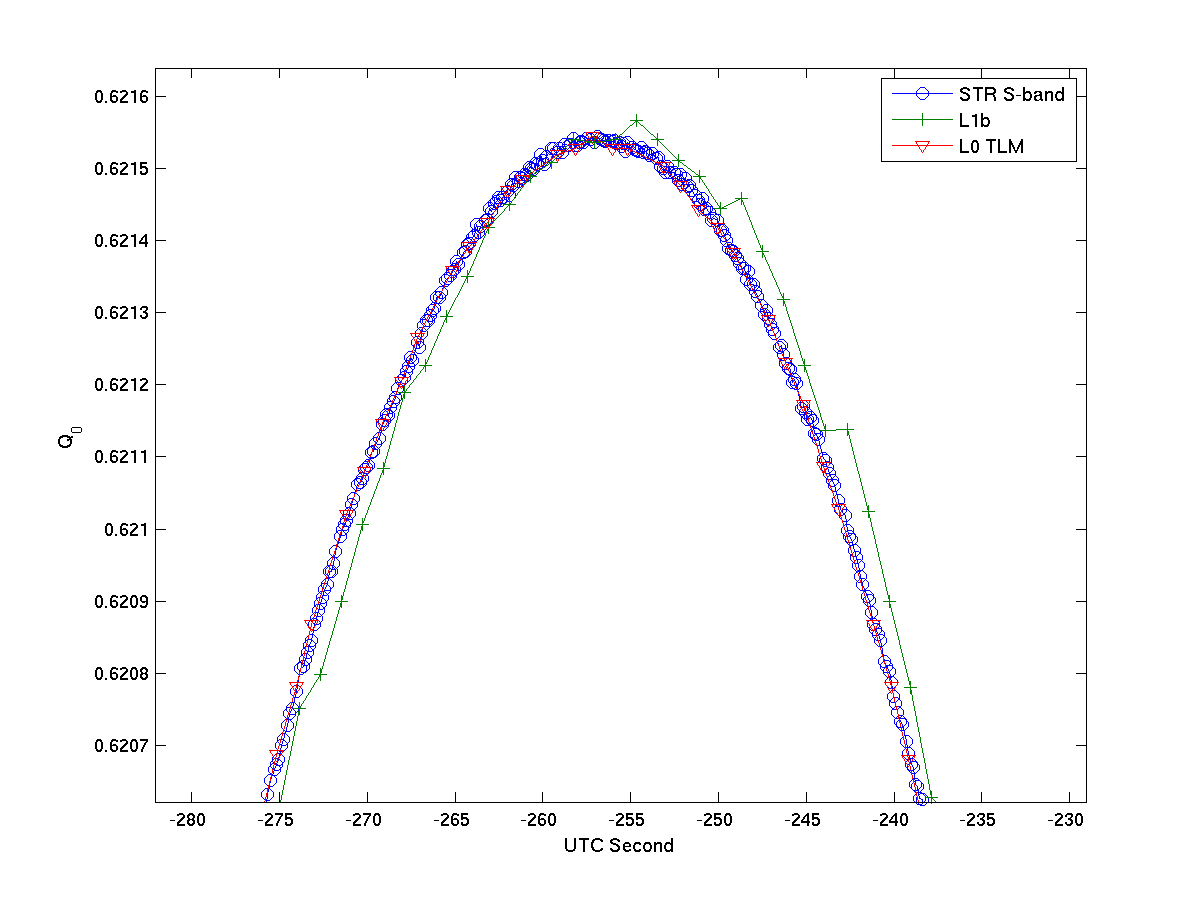 S’il apparaît que STR et L0 TLM concordent assez bien (en mode calibration externe, le senseur stellaire n’est plus utilisé pour le SCAO), nous pouvons également voir que l’interpolation à la fréquence des snapshots parait introduire des discontinuités et un décalage d’environ 1″, très cohérent avec la tendance que j’ai pu observer sur les niveaux L1C sur Madagascar.J’ai aussi vérifié que ce n’était pas lié au fait d’être en mode calibration externe, en faisant le même genre de figure pour un produit en mode d’observation nominal, La figure ci dessous montre le même effet entre L0 et TLM L1B (il n’y a pas de données senseur stellaire pour ce produit, mais le STR est inclus dans le SCAO dans ce mode)
S’il apparaît que STR et L0 TLM concordent assez bien (en mode calibration externe, le senseur stellaire n’est plus utilisé pour le SCAO), nous pouvons également voir que l’interpolation à la fréquence des snapshots parait introduire des discontinuités et un décalage d’environ 1″, très cohérent avec la tendance que j’ai pu observer sur les niveaux L1C sur Madagascar.J’ai aussi vérifié que ce n’était pas lié au fait d’être en mode calibration externe, en faisant le même genre de figure pour un produit en mode d’observation nominal, La figure ci dessous montre le même effet entre L0 et TLM L1B (il n’y a pas de données senseur stellaire pour ce produit, mais le STR est inclus dans le SCAO dans ce mode)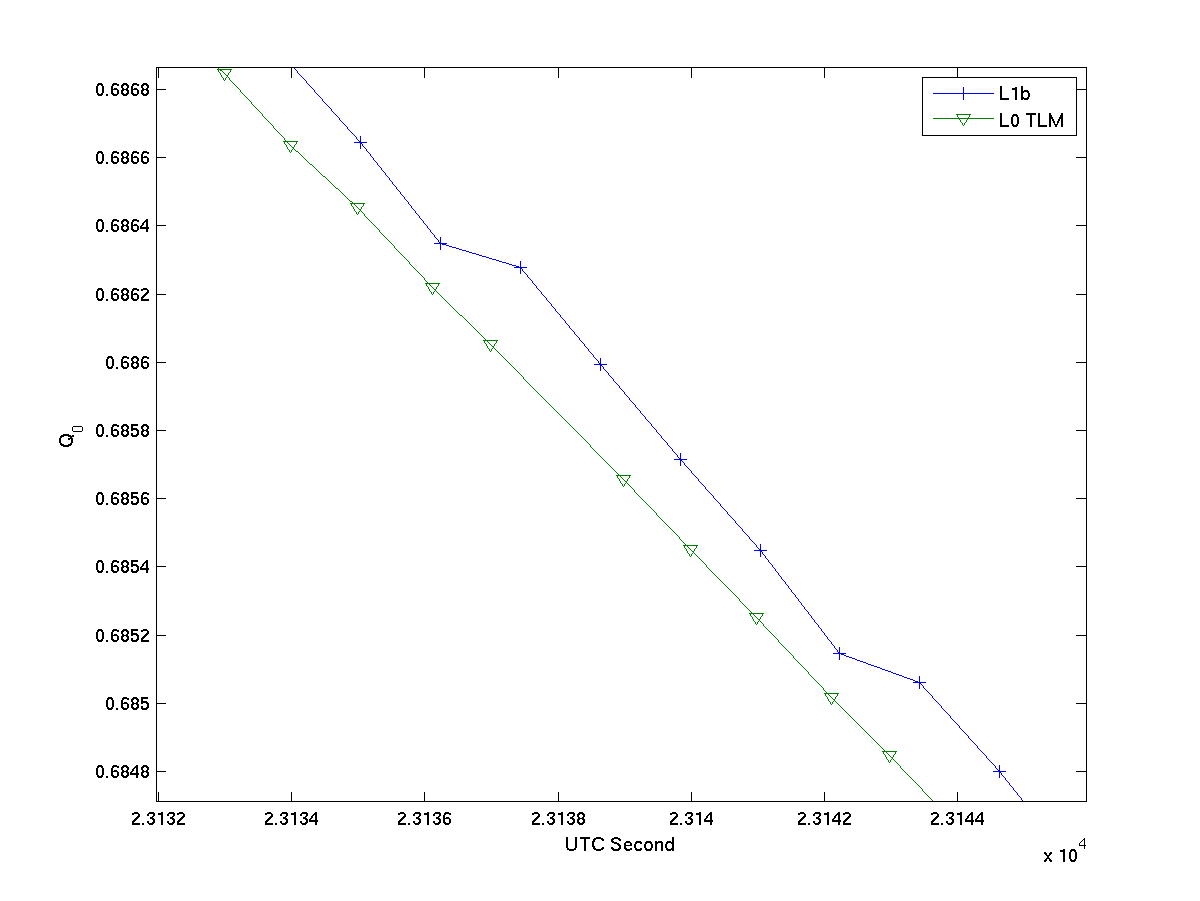 A ce stade, je sèche un peu… Aujourd’hui est prévue une nouvelle manoeuvre, avec un nouveau zoom à 8Hz sur le STR, avec A2 en pleine forme (normalement).
A ce stade, je sèche un peu… Aujourd’hui est prévue une nouvelle manoeuvre, avec un nouveau zoom à 8Hz sur le STR, avec A2 en pleine forme (normalement).